Design of an Electro-mechanical prosthetic finger, and a PID controller for the wrist.
 Snapshot from report
Snapshot from report
Abstract
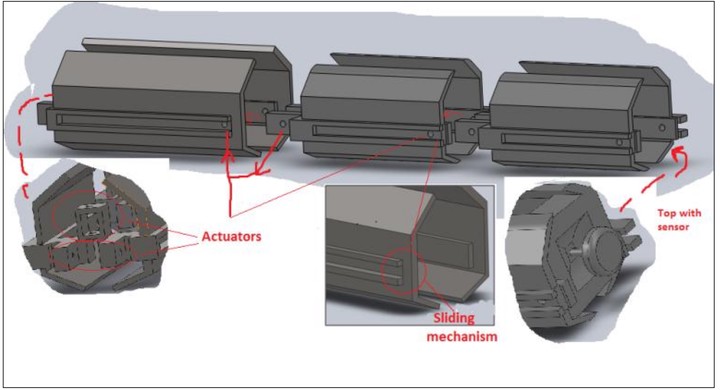
The design of the finger to be attached to a modular prosthetic hand and a controller solution for the wrist are explored in this effort. A novel design of a sliding body has been proposed using a Solidworks model where the outershell, providing form to the finger can be slid in or out off a of a light weight chassis and tightened with a screw. In addition to this the end effector is removabl. This provides an easy method to inspect the mechanism especially as the wiring and the motors are embedded inside.The report deals with key aspects such as the using the forward kinematics (Denavit-Hartenberg equations (DHE)) to component selection for building the model. The wrist is treated as as separate design issue and a Proportional Integral Derivative (PID) controller has been designed and manually tuned to control the rotation of the wrist, using Simulink. Though these continuous equations applied, are assuming ideal conditions, a saturation of the output provides realistic limits and conditions and a more realistic view of what occurs. The results obtained and the tuning process are explained and the conclusions are reached.” abstract_short = “Index Terms—, Denavit Hartenberg equations (DHE), Forward Kinematics, Prosthetic hands, PID controller.
View Report
Shreyas Ragavan
Nerd | Technophile | Data Scientist